Overview
GeoClaw is an open-source package within the Clawpack project for simulating shallow earth-surface flows involving water-wave propagation and inundation (e.g., tsunamis, storm surges and general overland flooding problems).
See software for more information about GeoClaw and the Clawpack project, or projects for some example applications involving GeoClaw. More information can also be found at geoclaw.org.
Background
GeoClaw evolved from a collection of algorithms developed for modeling tsunamis as part of my thesis work (George, 2006). Implemented in the Clawpack adaptive numerical framework, these algorithms provide robust inundation capturing and well-balanced resolution in the presence of dominant steady states (e.g., ocean at rest). Additionally, AMR schemes that preserve well-balancing and inundation capturing in conjunction with mass, momentum and energy conservation enable global-scale tsunami propagation and local-scale inundation in reasonably efficient single simulations ( see also, George, 2008; LeVeque, George, et al., 2011). These methods are more generally applicable to shallow free-surface flows over topography, which motivated the extension of GeoClaw to overland flooding problems in irregular terrain (e.g, George, 2010; Berger, George, et al., 2011). Later extensions of these algorithms were developed for storm-surge applications (e.g., Mandli, 2014). GeoClaw is now used for a variety of applications involving shallow water flows over topography. Features and enhancements continue to be developed within the Clawpack project (e.g., Mandli, Ahmadia, et al., 2016).
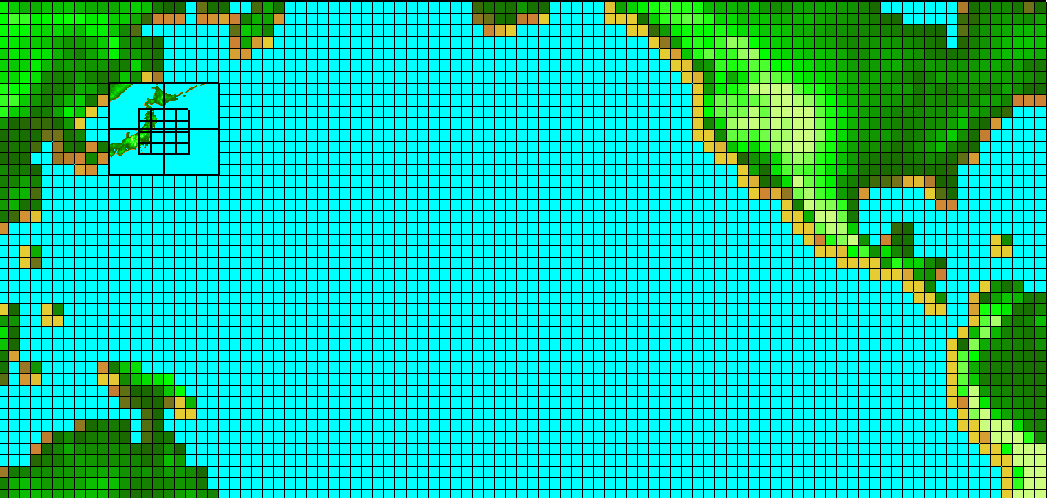
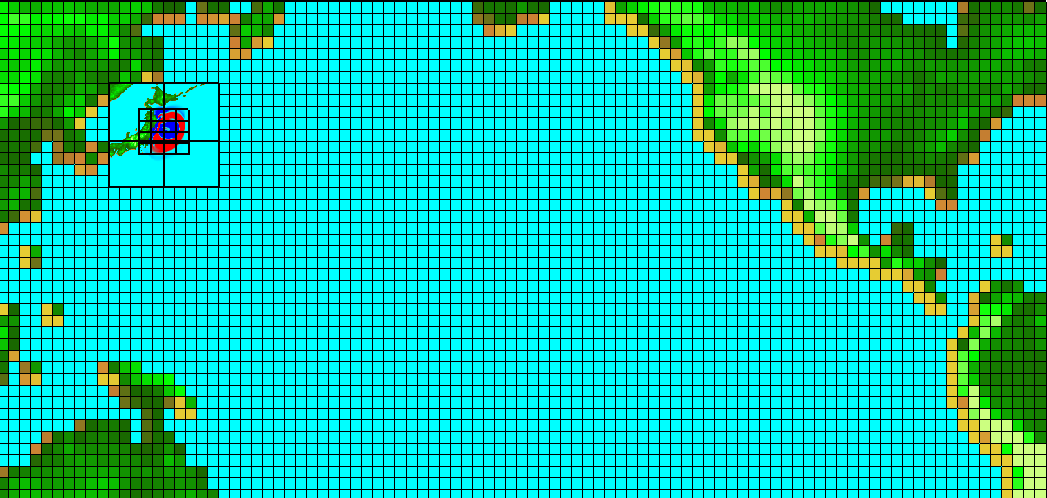
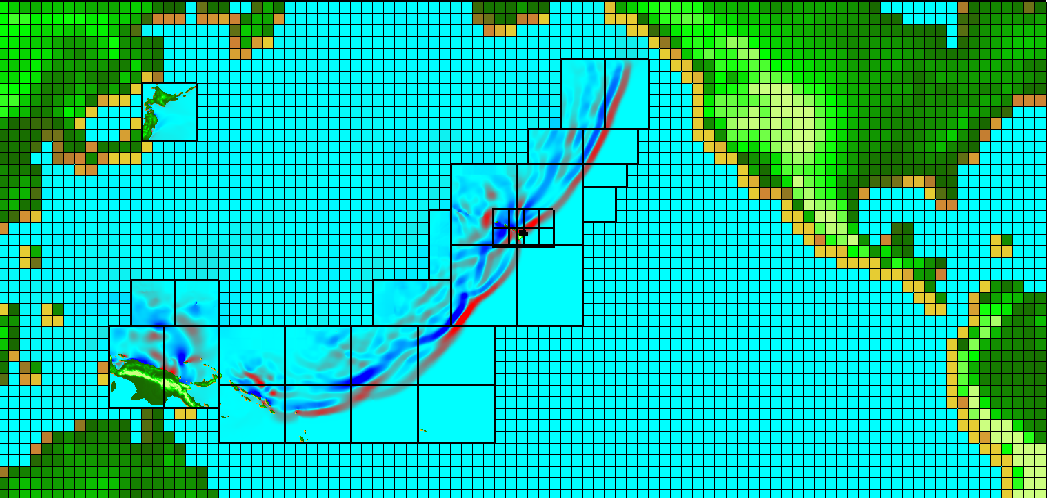
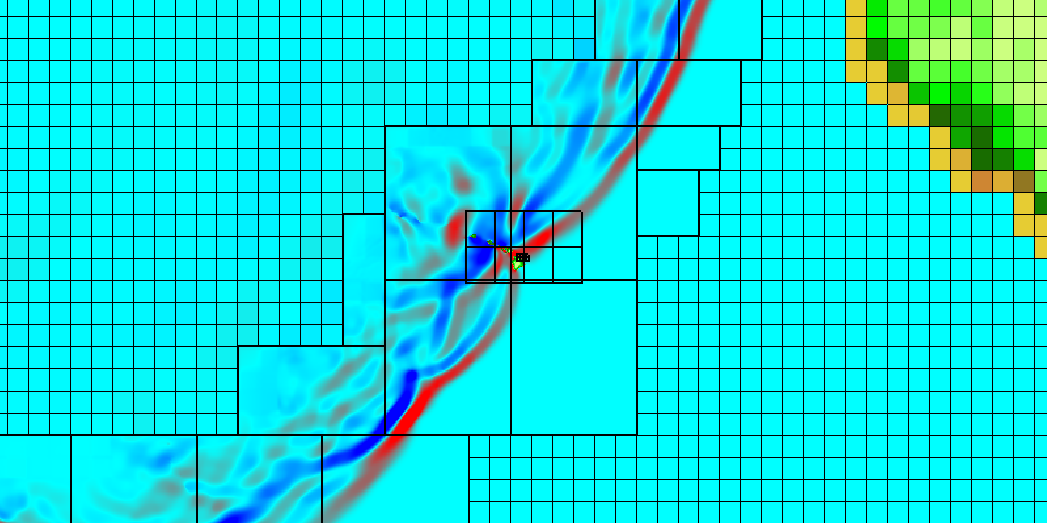
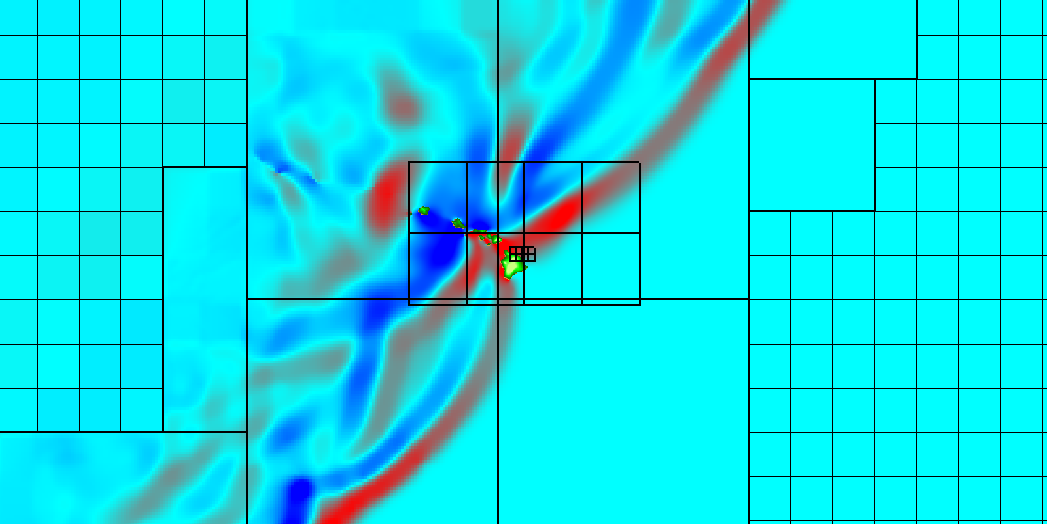
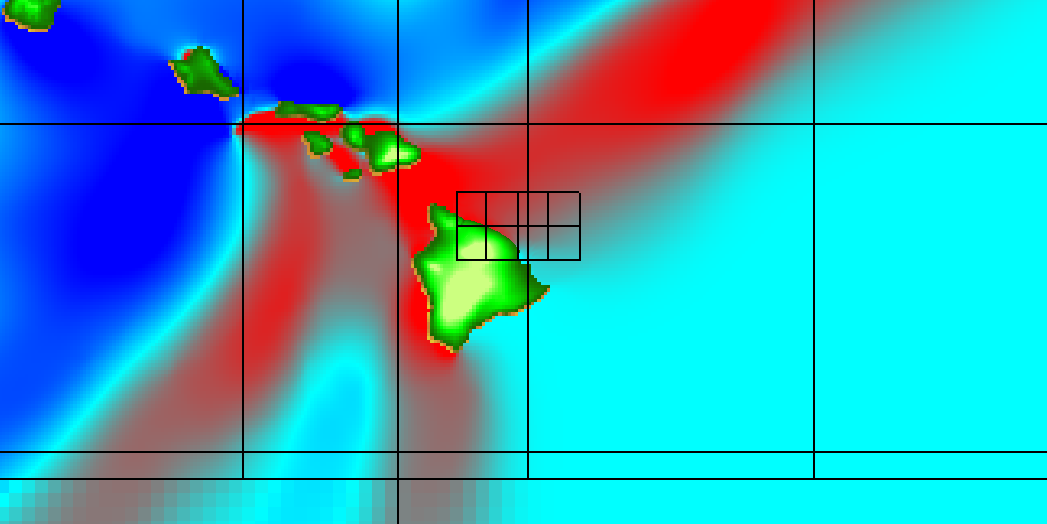
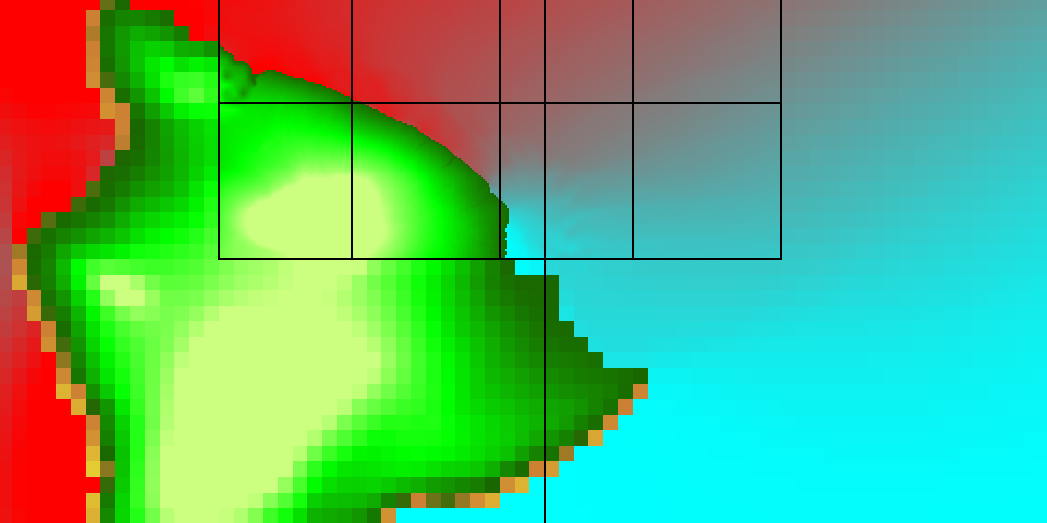
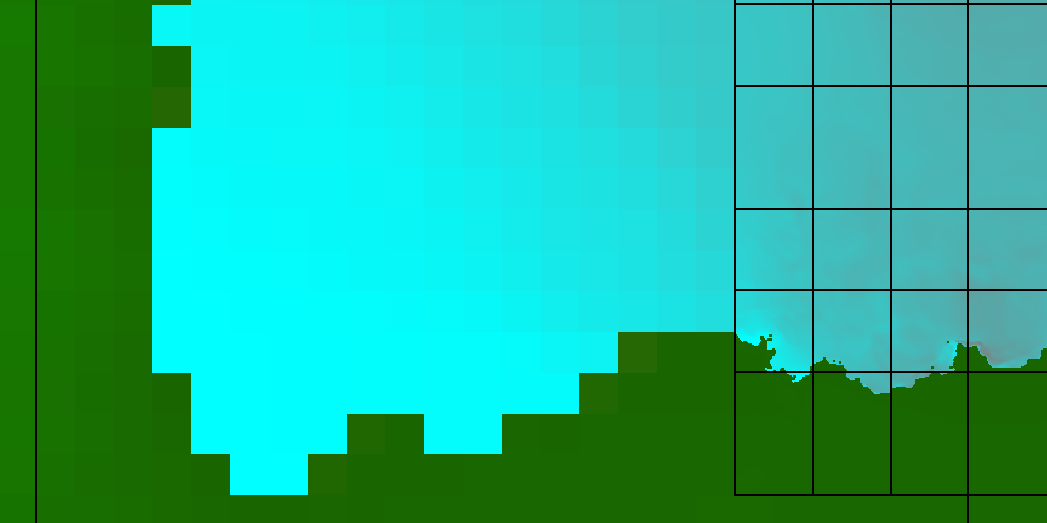
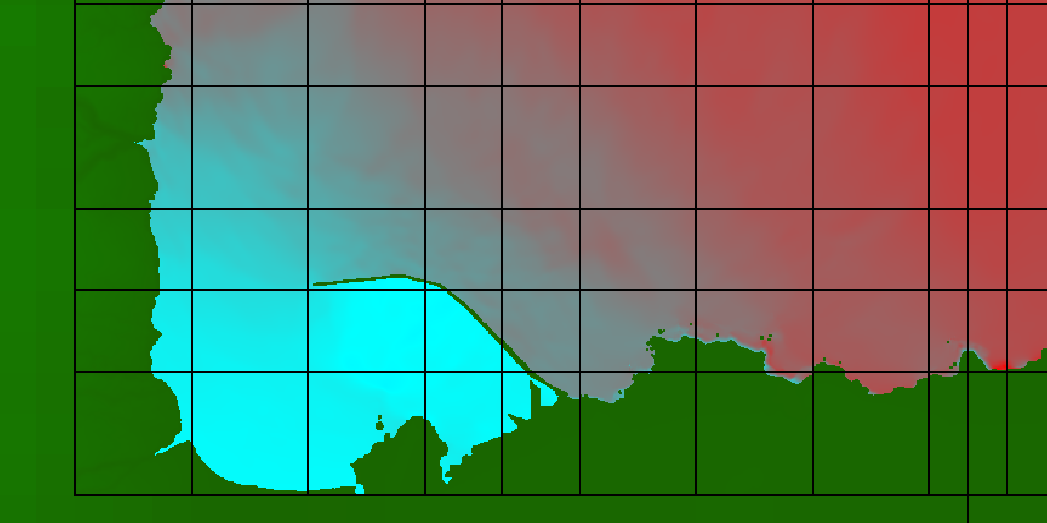
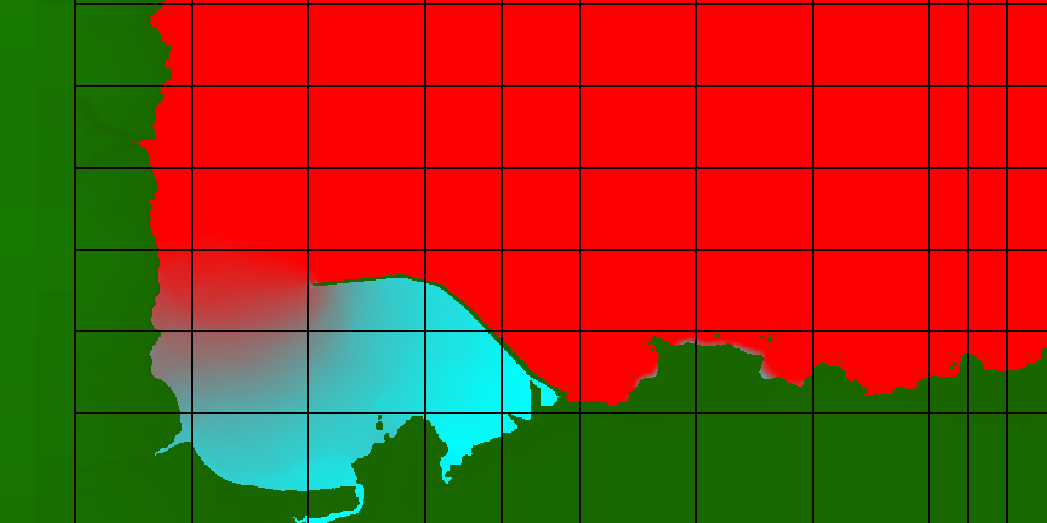
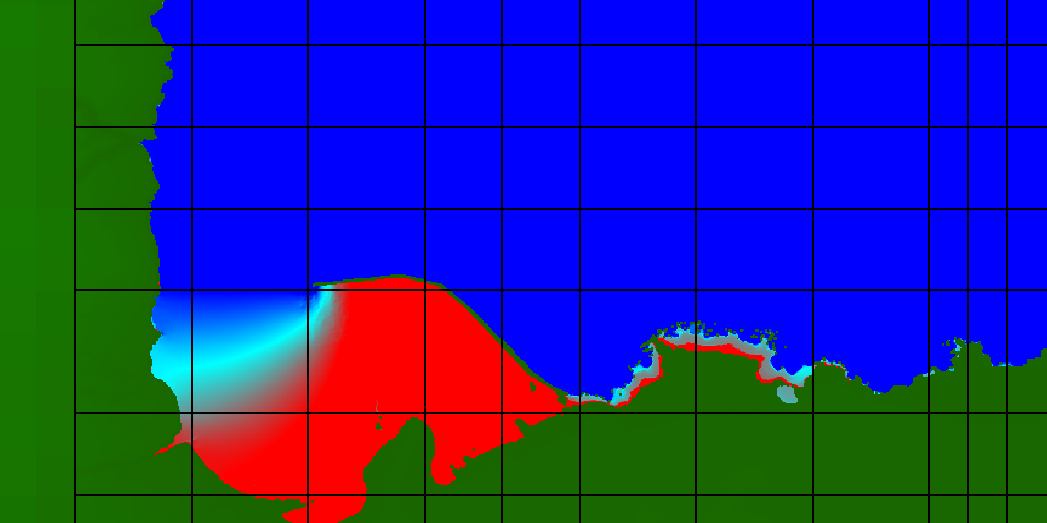
GeoClaw example: modeling transoceanic tsunami propagation and inundation: the 2011 Tohoku Tsunami.
A GeoClaw simulation of the 2011 Tohoku Tsunami, with inundation modeling of Hilo, HI. A coarse level-1 grid is used for the steady-state ocean at rest, refined to level-2 grids for deep-ocean wave propagation. Level-3 grids resolve the compressed waves as they approach the coastal waters of the Hawaiin Islands, with meter-scale level-4 grids resolving the harbor and inundation of Hilo, HI (the actual inundation was limited to small onshore waves). For a detailed description of GeoClaw algorithms related to AMR and other algorithms for tsunamis modeling, see (George, 2006; Berger, George et al., 2011; & LeVeque, George, et al., 2011).

References
see also geoclaw.org for links to publications involving GeoClaw.
- Finite volume methods and adaptive refinement for tsunami propagation and inundation, D.L. George, 2006. Ph.D. thesis, University of Washington, Seattle. pdf
- Augmented Riemann solvers for the shallow water equations over variable topography with steady states and inundation. D. L. George, 2008. J. Comput. Phys., 227(6): 3089–3113. pdf
- Tsunami modeling with adaptively refined finite volume methods. R.J. LeVeque, D.L. George and M.J. Berger, 2011. Acta Numerica 20, pp. 211–289. Arieh Iserles, ed. pdf
- The GeoClaw software for depth-averaged flows with adaptive refinement. M. J. Berger, D. L. George, R. J. LeVeque and K. T. Mandli, 2011. Advances in Water Resources, 34: 1195–1206. doi: 10.1016/j.advwatres.2011.02.016. pdf
- Adaptive finite volume methods with well-balanced Riemann solvers for modeling floods in rugged terrain: application to the Malpasset dam-break flood (France, 1959). D.L. George, 2010. Int. J. Numer. Methods Fluids, 66(8): 1000–1018. pdf
- Finite volume methods for hyperbolic problems. R.J. LeVeque, 2002. Texts in Applied Mathematics, Cambridge University Press.
- Local adaptive mesh refinement for shock hydrodynamics. M.J. Berger and P. Colella, 1989. J. Comput. Phys., 82: 64-84.
- Adaptive mesh refinement for storm surge. K.T. Mandli and C.N. Dawson, 2014. Ocean Modeling, V. 75, 36-50.